The MBSE working group has a subgroup "Application example" that deals with the pilot implementation of SysML V2, which is provided by the OMG. The main goal is to develop a first feeling for the possibilities but also the pitfalls of the new version SysML v2. Therefore the focus is on getting to know the syntax and semantics of the new version, the differences to v1, and just playing around with the language.
On the basis of an application example, the following aspects will be put through their paces:
- Modeling of requirements, behavior, and structure
- Collaboration and modularization of SysML v2 models
- Collecting feedback for the SST SysML v2 working group
- Evaluation of the existing implementation in Eclipse and Jupyter Notebook
Since there is currently not much literature available on the topic of SysML v2, we try to get a picture ourselves and make our findings and our example model available on this page.
Useful Links:
An extensive SysML Example
Under construction ...
package 'Robotic Vacuum Cleaner'{
private import Controller::*;
private import Navigation::*;
private import EnergySupply::*;
private import VacuumingSystem::*;
private import RobotPortDefs::*;
private import Requirement::*;
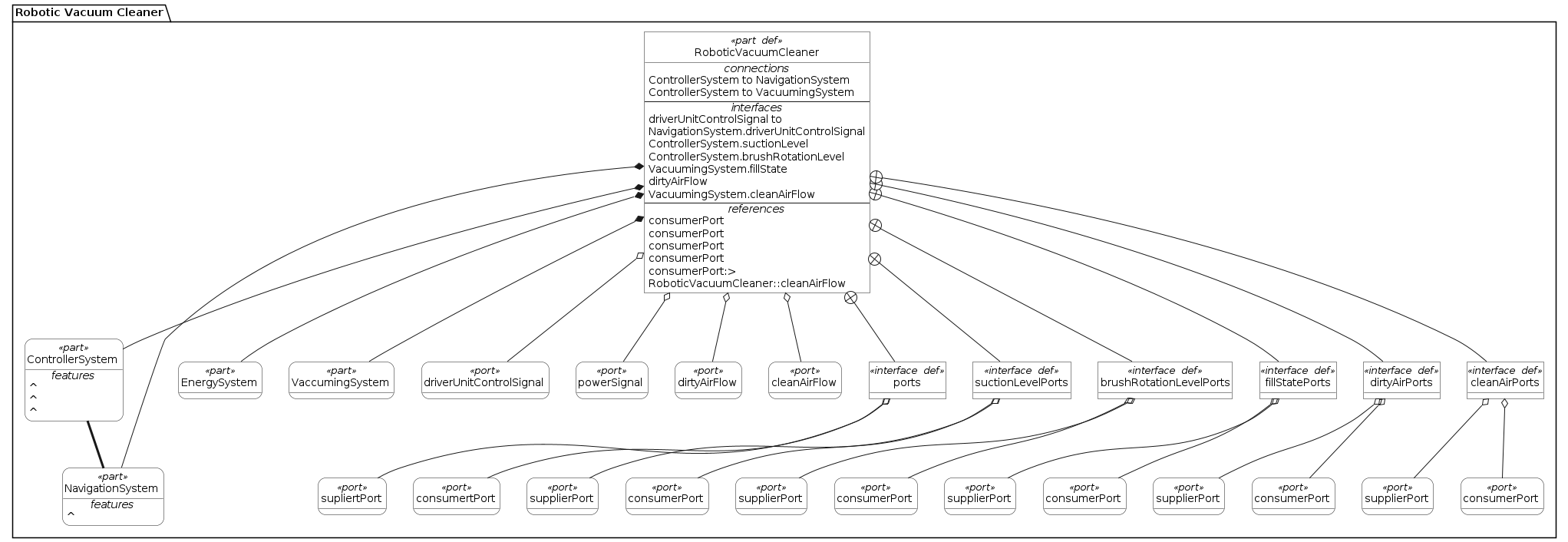
part def RoboticVacuumCleaner{
part ControllerSystem : controller;
part NavigationSystem : navigation;
part EnergySystem : EnergySupplySystem;
part VacuumingSystem : vacuumingSystem;
port driverUnitControlSignal : DriverUnitControlSignal;
port powerSignal : PowerSignal;
port dirtyAirFlow : DirtyAirFlow;
port cleanAirFlow : CleanAirFlow;
requirement lowBattery : Requirement::LowBattery{
subject roboticVacuumCleaner : RoboticVacuumCleaner;
}
requirement carpetDetected : Requirement::CarpetDetected{
subject roboticVacuumCleaner : RoboticVacuumCleaner;
}
satisfy lowBattery by NavigationSystem;
satisfy lowBattery by EnergySystem;
satisfy lowBattery by VacuumingSystem;
satisfy carpetDetected by NavigationSystem;
satisfy carpetDetected by EnergySystem;
satisfy carpetDetected by VacuumingSystem;
/*interface : DriverUnitControlInterface connect
supliertPort ::> ControllerSystem.driverSignalOutputPort to
consumerPort ::> NavigationSystem.driverUnitControlSignalInputPort;
*/
// Interfaces to/from Vaccuming System
connect ControllerSystem to VacuumingSystem;
// Control signal for level of suction intesity
interface def suctionLevelPorts {
end supplierPort : SuctionLevel;
end consumerPort : SuctionLevel;
}
interface: suctionLevelPorts connect
supplierPort ::> ControllerSystem.suctionLevel to
consumerPort ::> VacuumingSystem.suctionLevel;
// Control signal for brush rotation level
interface def brushRotationLevelPorts {
end supplierPort : BrushRotationLevel;
end consumerPort : BrushRotationLevel;
}
interface: brushRotationLevelPorts connect
supplierPort ::> ControllerSystem.brushRotationLevel to
consumerPort ::> VacuumingSystem.bs.brushRotationLevel;
// Current fill state of debris container
interface def fillStatePorts {
end supplierPort : FillState;
end consumerPort : FillState;
}
interface: fillStatePorts connect
supplierPort ::> VacuumingSystem.fillState to
consumerPort ::> ControllerSystem.fillState;
// Dirty air flow
interface def dirtyAirPorts {
end supplierPort : DirtyAirFlow;
end consumerPort : DirtyAirFlow;
}
interface: dirtyAirPorts connect
supplierPort ::> dirtyAirFlow to
consumerPort ::> VacuumingSystem.dirtyAirFlow;
// Clean air flow
interface def cleanAirPorts {
end supplierPort : CleanAirFlow;
end consumerPort : CleanAirFlow;
}
interface: cleanAirPorts connect
supplierPort ::> VacuumingSystem.cleanAirFlow to
consumerPort ::> cleanAirFlow;
state def VacuumCleanerBehavior{
doc /* This is the Statemachine Diagram */
entry; then Idle;
/* It seems that we need to declare actions here and */
action doNavigate : RoboticVacuumCleaner::NavigationSystem::DoNavigate;
action findHome : RoboticVacuumCleaner::NavigationSystem::FindHome;
action isCarpet : RoboticVacuumCleaner::ControllerSystem::IsCarpet;
attribute startVacuumingSignal : RoboticVacuumCleaner::ControllerSystem::StartVacuumingSignal;
attribute stopVacuumingSignal : RoboticVacuumCleaner::ControllerSystem::StopVacuumingSignal;
attribute idleVacuumingSignal : RoboticVacuumCleaner::ControllerSystem::IdleVacuumingSignal;
attribute lowBatterySignal : RoboticVacuumCleaner::EnergySystem::LowBatterySignal;
attribute charingSignal : RoboticVacuumCleaner::EnergySystem::CharingSignal;
attribute continueVacuumingSingal : RoboticVacuumCleaner::EnergySystem::ContinueVacuumingSingal;
/* It seems that we need to composite actions
We might need to consider race-conditions*/
action VaccumingDoActions {
perform doNavigate;
perform isCarpet;
// Energy: DoEnergy()
// Vacuum: DoVacuum()
}
action ChargingDoActions{
// Energy: DoCharge()
perform findHome;
// Vacuum: EmptyVacuum()
}
// States
state Idle{
}
state Vaccuming {
do VaccumingDoActions;
}
state Finish{
}
state LowBattery{
}
state Charging {
do ChargingDoActions;
}
//Transition
transition IdleToVaccuming
first Idle
accept startVacuumingSignal
then Vaccuming;
transition VaccumingToFinish
first Vaccuming
accept stopVacuumingSignal
then Finish;
transition FinishToIdle
first Finish
accept idleVacuumingSignal
then Idle;
transition ChargingToVacuuming
first Charging
accept continueVacuumingSingal
then Vaccuming;
transition VaccumingToLowBattery
first Vaccuming
accept lowBatterySignal
then LowBattery;
transition LowBatteryToCharing
first LowBattery
accept charingSignal
then Charging;
}
}
} 
package Controller{
private import RobotPortDefs::*;
private import Signals::ControllerSignals::*;
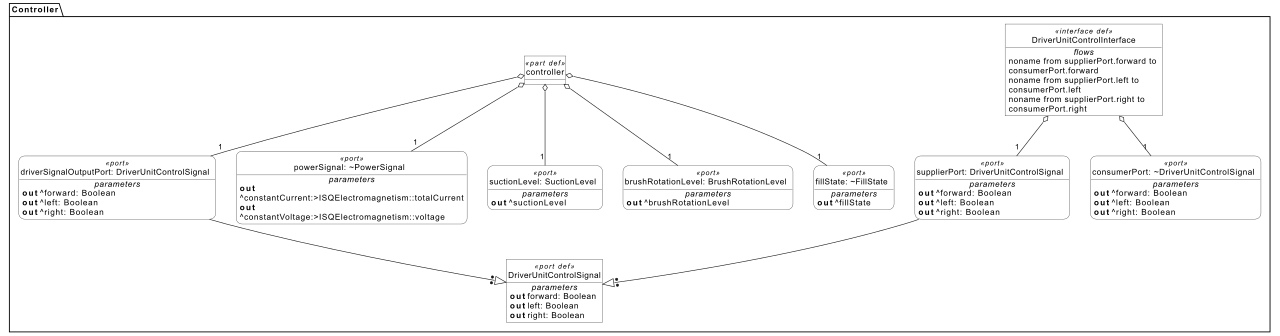
port def DriverUnitControlSignal {
out attribute forward;
out attribute left;
out attribute right;
}
interface def DriverUnitControlInterface{
end supplierPort : DriverUnitControlSignal;
end consumerPort : ~DriverUnitControlSignal;
flow supplierPort.forward to consumerPort.forward;
flow supplierPort.left to consumerPort.left;
flow supplierPort.right to consumerPort.right;
}
part def controller{
action def IsCarpet;
attribute def StartVacuumingSignal;
attribute def StopVacuumingSignal;
attribute def IdleVacuumingSignal;
port driverSignalOutputPort : DriverUnitControlSignal;
port powerSignal : ~PowerSignal;
// To Vacuuming System
port suctionLevel : SuctionLevel;
port brushRotationLevel : BrushRotationLevel;
// From Vacuuming System
port fillState : ~FillState;
}
} package EnergySupply {
doc /*
=======================================================================
The following SysML v2 package specifies the energy
supply system of the vacuum cleaner robot
=======================================================================
*/
private import PortDef::*;
private import Signals::*;
private import ESS_Processor::*;
private import ESS_Bat::Battery;
private import ESS_Reg::*;
private import ESS_Charge::*;
private import Signals::BatterySignals::BatterySignal;
private import RobotPortDefs::*;
/* Part definitions */
// The Energy supply system provides the electical energy for the robot vacuum cleaner
part def EnergySupplySystem {
//signals
attribute def LowBatterySignal;
attribute def CharingSignal;
attribute def ContinueVacuumingSingal;
// Parts
part chr : Charger;
part bat : Battery;
part cpu : BatteryLevelComputer;
part reg : VoltageRegulator;
// Ports
port sig : ~EnergyDistributionCommand; // in
port requiredEnergy : PowerInOutPort; // in
port providedEnergy : PowerInOutPort; // out
// Connections
interface connect
src ::> requiredEnergy to
tgt ::> bat.requriedEnergy;
interface connect
src ::> sig to
tgt ::> cpu.energyDemand;
interface connect
src ::> reg.providedEnergy to
tgt ::> providedEnergy;
// connect sub-components
interface connect
src ::> cpu.chargeCmd to
tgt ::> chr.chargeCmd;
interface connect
src ::> cpu.energyLevel to
tgt ::> reg.tgtVoltage;
interface connect
src ::> chr.batPlug to
tgt ::> bat.requriedEnergy;
interface connect
src ::> bat.providedEnergy to
tgt ::> reg.batEnergy;
}
} package ESS_Bat {
private import ScalarValues::*;
private import RoboCleanRequirements::*;
private import PortDef::*;
private import Signals::*;
private import Signals::BatterySignals::BatterySignal;
doc /*
=======================================================================
The following SysML v2 package specifies the battery
of the vacuum cleaner robot in a black-box fashion
=======================================================================
*/
part def Battery {
// current charge
attribute capacity :> activeEnergy;
attribute totCapacity :> activeEnergy;
// Ports
port requriedEnergy : PowerInOutPort; // input from charging station
port providedEnergy : PowerInOutPort; // output to other robot components
}
part def Accumulator {
item def Energy;
attribute mass : Real;
// attribute TotCapacity : ActiveEnergyValue;
attribute TotCapacity;
part def cell {
Capacity : Real;
Voltage : Real;
}
part def cellConnector;
attribute def layout {
numOfParCells : Integer;
numOfSerCells : Integer;
}
}
part def BMS { // @Ralf: now instantiated by CPU?
// Maybe move to EnergySupply.sysml
// Parts
part def volSensor;
part def curSensor;
part def tempSensor;
part def microController;
part def Balancer;
// Ports
port batSig : BatterySignal;
}
comment about BMS
/* BMS = Battery Management System */
} package ESS_Processor {
private import Signals::*;
private import ScalarValues::*;
private import ControllerSignals::*;
private import Signals::BatterySignals::BatterySignal;
private import RobotPortDefs::*;
/**
* This part takes a BatterySignal as input and translates it into a
* color to be shown by the LED of EnergySupplySystem
*/
part def BatteryLevelComputer {
// Ports
port energyDemand : ~EnergyDistributionCommand; // in
port chargeCmd : ChargeCommand; // out
port energyLevel : EnergyRegulation; // out
// Attributes
attribute batteryCapacity : Real = 1000;
// Behavior
// Realized through a StateChart which takes inputs from the incoming port
// and part attribute. Produces a return value to outgoing port ledSig.
exhibit state BatteryLevelComputerStates {
in ref maxBatCap = batteryCapacity; // 'this' would be nice
//out ref ledSig {color = computedColor;}
}
}
/**
* As actions need to be instnatiated somewhere, we leverage a very small
* statechart to perform the actual computations.
*/
state def BatteryLevelComputerStates {
entry; then x; // Initial state x
// Definition of state x instantiates action
state x {
entry act {batCap; maxBatCap; computedColor;}
}
}
action act : ComputeBatteryInfo{batCap; maxBatCap; computedColor;}
/**
* The action ComputeBatteryInfo delegates to the calculation CalcBatteryLevel
*/
action def ComputeBatteryInfo{in batteryCapacity : Real;
in maxBatteryCapacity : Real;
out batteryColor : LED_COLOR = CalcBatteryLevel(batteryCapacity, maxBatteryCapacity);
}
calc def CalcBatteryLevel{
in energy : Real;
in capacity : Real;
energy / capacity
}
} package ESS_Charge {
private import ScalarValues::*;
private import PortDef::*;
private import RobotPortDefs::*;
part def Charger {
attribute doCharge : Boolean;
port chargeCmd : ~ChargeCommand;
port statPlug : PowerInOutPort;
port batPlug : PowerInOutPort;
}
} package 'EnergySupplyTypes' {
import ScalarValues::*;
import Signals::ControllerSignals::*;
doc /*
=======================================================================
This package defines basic datatypes used throughout the EnergySupply
and related components
=======================================================================
*/
// TODO: Should we use SI units?
/// DATA TYPES ///////////////////////////////////////////////////////////////
item def ElectricalEnergy;
/// PORTS ////////////////////////////////////////////////////////////////////
port def EnergyInOutPort {
inout item e : ElectricalEnergy; // TODO: units?
}
port def RelativeBatteryLevelPort {
attribute voltageInPercent : ScalarValues::Real;
// TODO: Muss es hier ein flow feature geben
// in ??? wert : Real;
}
port def BatteryLevelColorPort {
attribute color : LED_COLOR;
}
/// CONNECTIONS ///////////////////////////////////////////////////////////////
connection def WhySoComplicated {
end : ScalarValues::Real;
end : ScalarValues::Real;
}
connection def EnergyToEnergy {
end : ElectricalEnergy;
end : ElectricalEnergy;
}
} package ESS_Reg {
private import PortDef::*;
private import RobotPortDefs::*;
part def VoltageRegulator {
// Ports
port tgtVoltage : ~EnergyRegulation;
port batEnergy : PowerInOutPort; // input from battery
port providedEnergy : PowerInOutPort; // output to other robot components
}
} package Navigation{
/*This module implements the Navigation-System
* The Navigation-System is used for navigating the system
*/
private import RobotPortDefs::*;
private import Controller::*;
private import Bumber::*;
private import Engine::*;
private import LaserTower::*;
private import DriveController::*;
private import InfraredController::*;
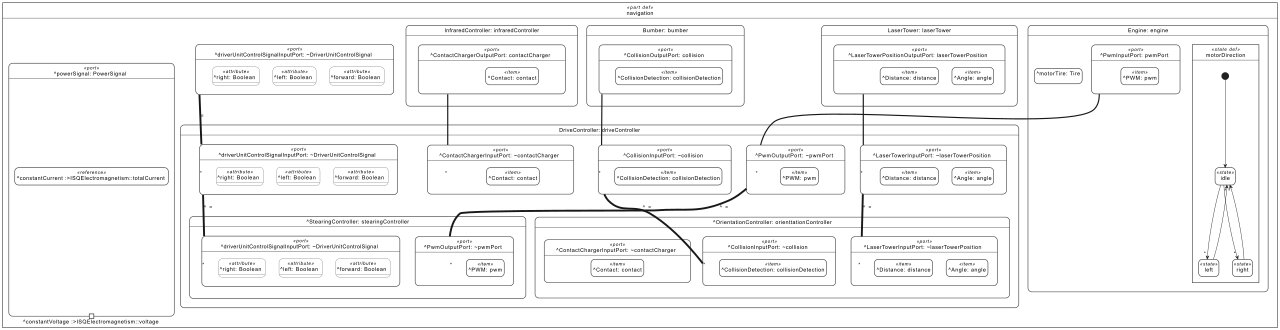
part def navigation{
action def DoNavigate;
action def FindHome;
part DriveController : driveController;
part Engine[2] : engine;
part LaserTower : laserTower;
part Bumber : bumber;
part InfraredController : infraredController;
port driverUnitControlSignalInputPort : ~DriverUnitControlSignal;
port powerSignal : PowerSignal;
bind driverUnitControlSignalInputPort = DriveController.driverUnitControlSignalInputPort;
interface : bumberInterface connect
suppliertPort ::> Bumber.CollisionOutputPort to
consumerPort ::> DriveController.CollisionInputPort;
interface : laserTowerInterface connect
supplierPort ::> LaserTower.LaserTowerPositionOutputPort to
consumerPort ::> DriveController.LaserTowerInputPort;
interface : infraredControllerInterface connect
supplierPort ::> InfraredController.ContactChargerOutputPort to
consumerPort ::> DriveController.ContactChargerInputPort;
interface : pwmControllInterface connect
suppliertPort ::> Engine.PwmInputPort to
consumerPort ::> DriveController.PwmOutputPort;
}
} 
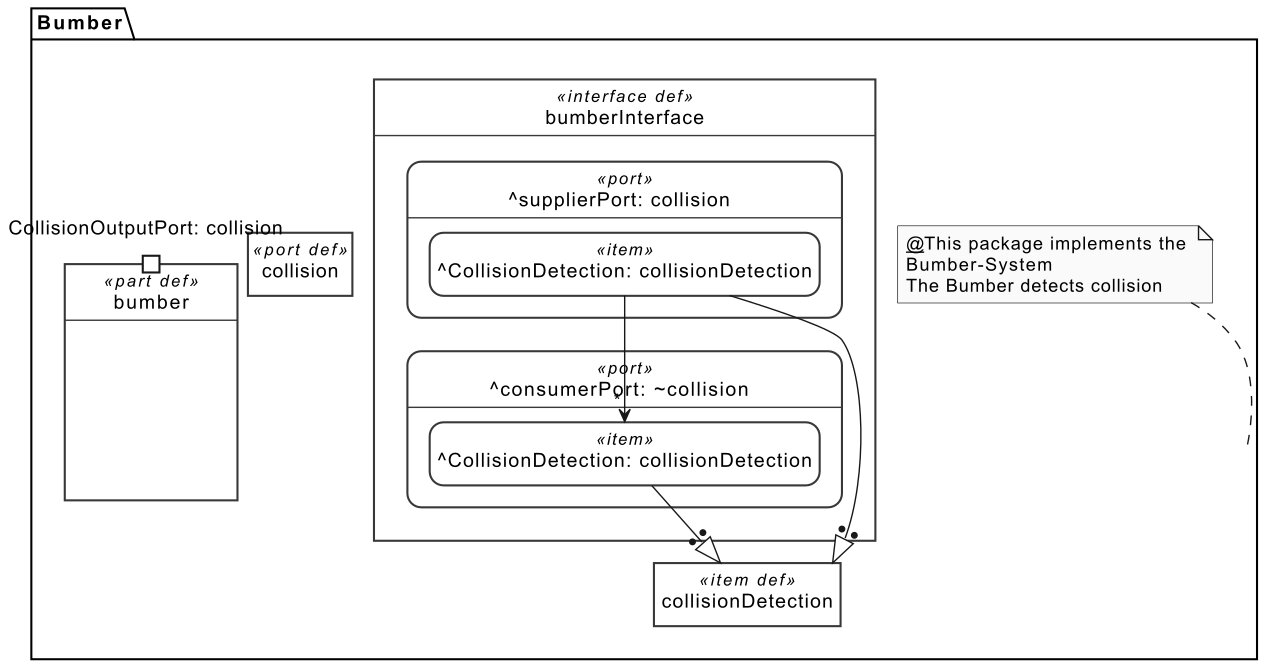
package Bumber{
/* This package implements the Bumber-System
* The Bumber detects collision*/
item def collisionDetection;
port def collision {
out item CollisionDetection : collisionDetection;
}
interface def bumberInterface{
end supplierPort : collision;
end consumerPort : ~collision;
flow supplierPort.CollisionDetection to consumerPort.CollisionDetection;
}
part def bumber {
port CollisionOutputPort : collision;
}
} 
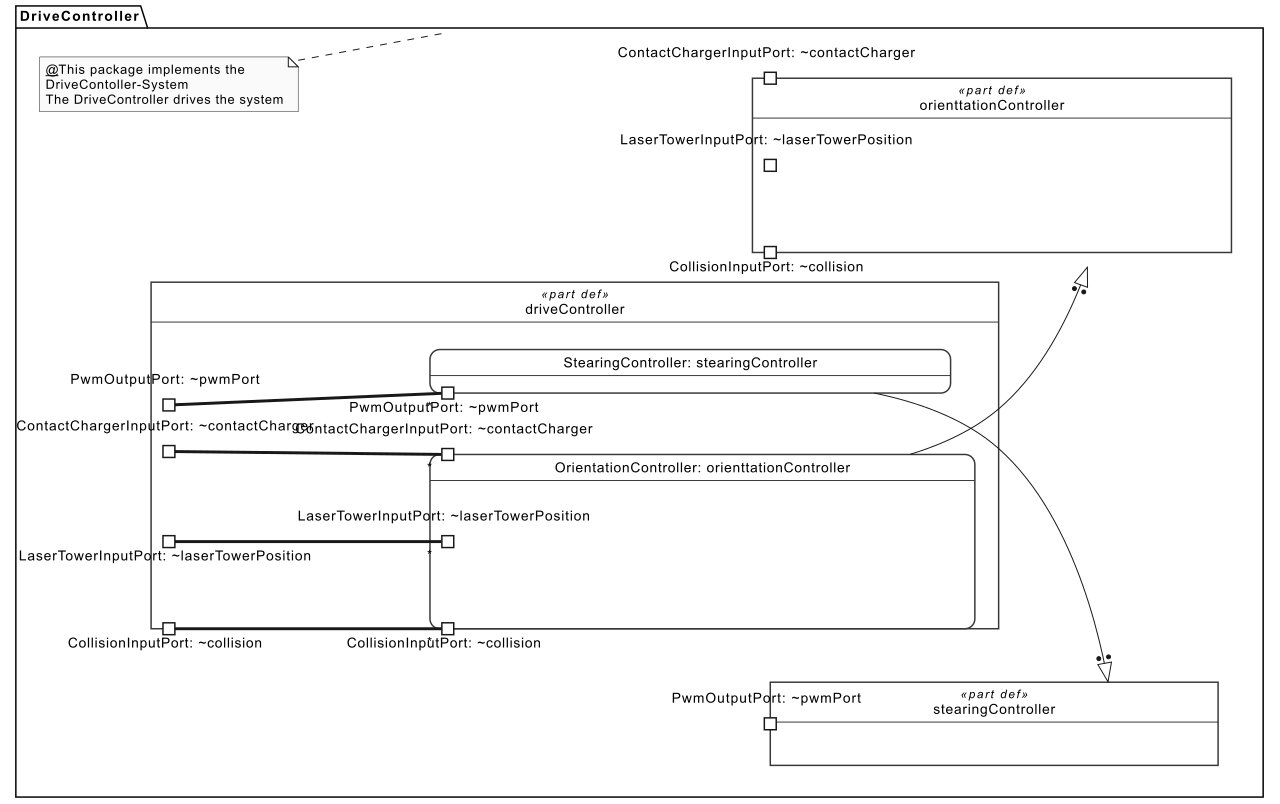
package DriveController{
/* This package implements the DriveContoller-System
* The DriveController drives the system*/
private import Controller::*;
private import Bumber::*;
private import Engine::*;
private import LaserTower::*;
private import InfraredController::*;
private import InfraredController::infraredController;
part def stearingController{
port PwmOutputPort : ~pwmPort;
port driverUnitControlSignalInputPort : ~DriverUnitControlSignal;
}
part def orienttationController{
port CollisionInputPort : ~collision;
port LaserTowerInputPort : ~laserTowerPosition;
port ContactChargerInputPort : ~contactCharger;
}
part def driveController {
port CollisionInputPort : ~collision;
port LaserTowerInputPort : ~laserTowerPosition;
port PwmOutputPort : ~pwmPort;
port ContactChargerInputPort : ~contactCharger;
port driverUnitControlSignalInputPort : ~DriverUnitControlSignal;
part StearingController : stearingController;
part OrientationController : orienttationController;
bind CollisionInputPort = OrientationController.CollisionInputPort;
bind PwmOutputPort = StearingController.PwmOutputPort;
bind LaserTowerInputPort = OrientationController.LaserTowerInputPort;
bind driverUnitControlSignalInputPort = StearingController.driverUnitControlSignalInputPort;
}
} 
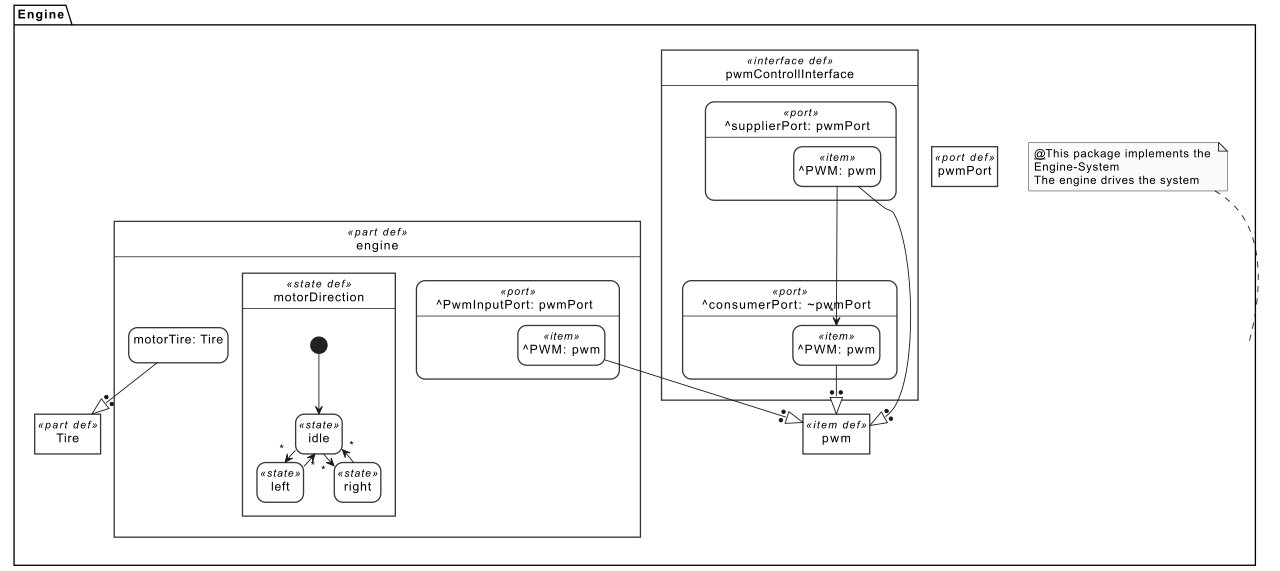
package Engine{
/* This package implements the Engine-System
* The engine drives the system*/
part def Tire;
item def pwm;
port def pwmPort{
in item PWM : pwm;
}
interface def pwmControllInterface{
end supplierPort : pwmPort;
end consumerPort : ~pwmPort;
flow supplierPort.PWM to consumerPort.PWM;
}
part def engine {
part motorTire : Tire [2];
port PwmInputPort : pwmPort;
state def motorDirection {
entry; then idle;
state idle;
transition idle_to_left
first idle
then left;
transition idle_to_right
first idle
then right;
state left;
transition left_to_idle
first left
then idle;
state right;
transition right_to_idle
first right
then idle;
}
}
} 
package LaserTower{
/* This package implements the LaserTower-System
* The LaserTower finds the relative position to other objects*/
item def angle;
item def distance;
port def laserTowerPosition{
out item Angle : angle;
out item Distance : distance;
}
interface def laserTowerInterface {
end supplierPort : laserTowerPosition;
end consumerPort : ~laserTowerPosition;
flow supplierPort.Angle to consumerPort.Angle;
flow supplierPort.Distance to consumerPort.Distance;
}
part def laserTower {
port LaserTowerPositionOutputPort : laserTowerPosition;
}
} 
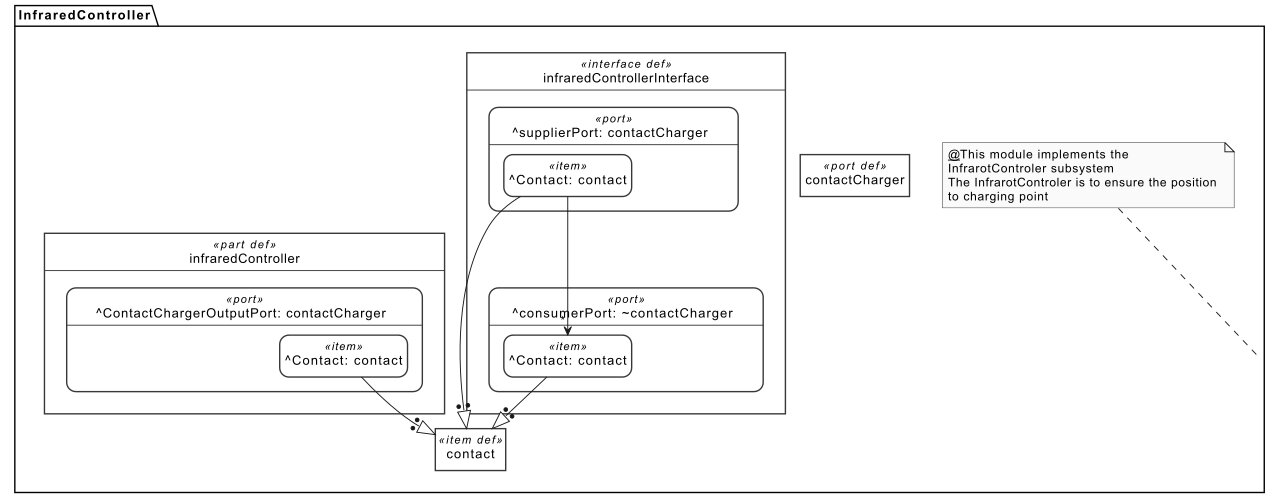
package InfraredController{
/*This module implements the InfrarotControler subsystem
* The InfrarotControler is to ensure the position to charging point */
item def contact;
port def contactCharger{
out item Contact : contact;
}
interface def infraredControllerInterface{
end supplierPort : contactCharger;
end consumerPort : ~contactCharger;
flow supplierPort.Contact to consumerPort.Contact;
}
part def infraredController{
port ContactChargerOutputPort : contactCharger;
}
} 

package RobotPortDefs {
private import ScalarValues::*;
private import ISQ::*;
// Ports for Navigation System
port def PowerSignal {
out constantCurrent :> totalCurrent;
out constantVoltage :> voltage;
}
// Ports for Vacuuming System
port def DirtyAirFlow {
out dirtyAirFlow :> ISQSpaceTime::volume;
}
port def CleanAirFlow {
out cleanAirFlow :> ISQSpaceTime::volume;
}
port def Debris {
out debrisVolume :> SI::'m³';
out debrisMass :> SI::kg;
}
port def FillState {
out fillState : Real;
}
port def SuctionLevel {
out suctionLevel : Real;
}
port def SuctionPower {
out suctionPower :> ISQ::power;
}
port def BrushRotationLevel {
out brushRotationLevel : Real;
}
port def BrushRotationSpeed {
out brushRotationSpeed :> ISQSpaceTime::rotationalFrequency;
}
// Ports for Energy Supply System
port def ChargeCommand {
out cmd : ChargeCmdLiterals;
}
enum def ChargeCmdLiterals {
START_CHARGING;
STOP_CHARGING;
}
port def EnergyRegulation {
out attribute volt : Real;
}
port def EnergyDistributionCommand {
// ToDo
}
} 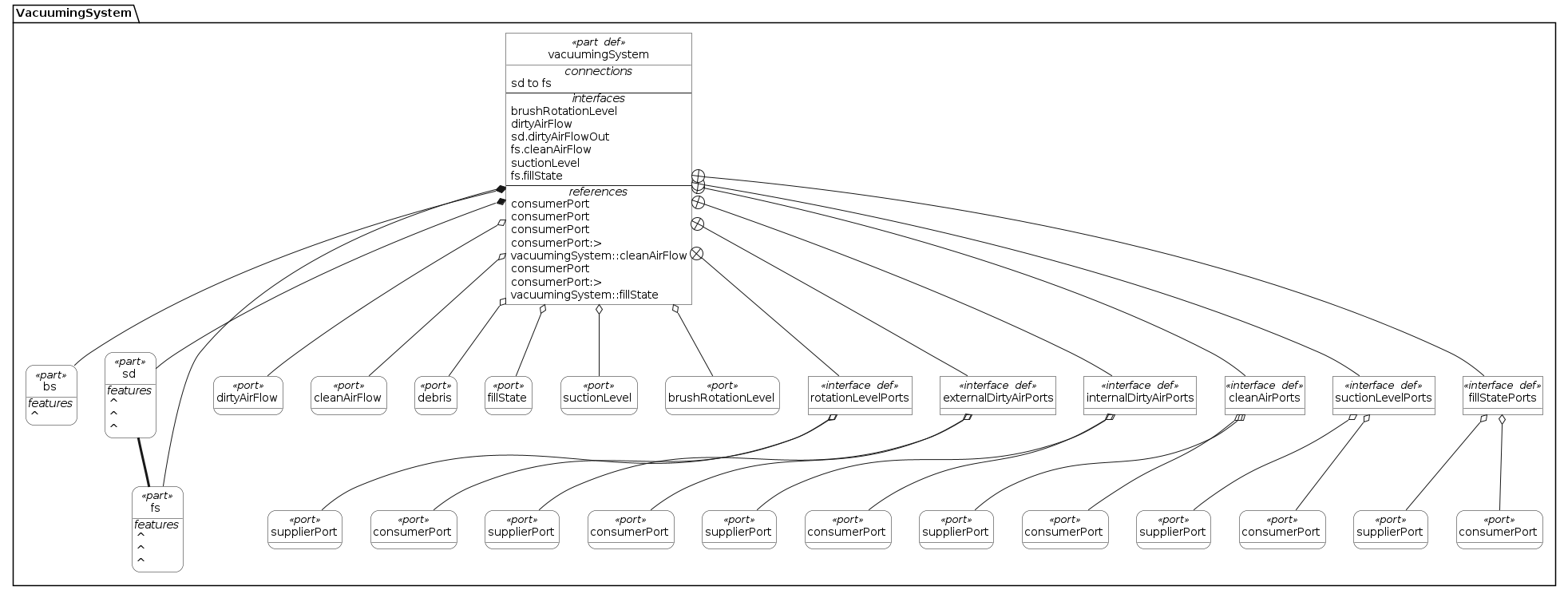
package VacuumingSystem{
private import BrushSystem::*;
private import SuctionDevice::*;
private import FilterSystem::*;
private import Ports::*;
private import RobotPortDefs::*;
part def vacuumingSystem{
part bs : brushSystem;
part sd : suctionDevice;
part fs : filterSystem;
port dirtyAirFlow : DirtyAirFlow;
port cleanAirFlow : CleanAirFlow;
port debris : Debris;
port fillState : FillState;
port suctionLevel : ~SuctionLevel;
port brushRotationLevel : ~BrushRotationLevel;
interface def rotationLevelPorts {
end supplierPort : BrushRotationLevel;
end consumerPort : BrushRotationLevel;
}
interface: rotationLevelPorts connect
supplierPort ::> brushRotationLevel to
consumerPort ::> bs.brushRotationLevel;
interface def externalDirtyAirPorts {
end supplierPort : DirtyAirFlow;
end consumerPort : DirtyAirFlow;
}
interface: externalDirtyAirPorts connect
supplierPort ::> dirtyAirFlow to
consumerPort ::> sd.dirtyAirFlowIn;
connect sd to fs;
interface def internalDirtyAirPorts {
end supplierPort : DirtyAirFlow;
end consumerPort : DirtyAirFlow;
}
interface: internalDirtyAirPorts connect
supplierPort ::> sd.dirtyAirFlowOut to
consumerPort ::> fs.dirtyAirFlow;
interface def cleanAirPorts {
end supplierPort : CleanAirFlow;
end consumerPort : CleanAirFlow;
}
interface: cleanAirPorts connect
supplierPort ::> fs.cleanAirFlow to
consumerPort ::> cleanAirFlow;
interface def suctionLevelPorts {
end supplierPort : SuctionLevel;
end consumerPort : SuctionLevel;
}
interface: suctionLevelPorts connect
supplierPort ::> suctionLevel to
consumerPort ::> sd.suctionLevel;
interface def fillStatePorts {
end supplierPort : FillState;
end consumerPort : FillState;
}
interface: fillStatePorts connect
supplierPort ::> fs.fillState to
consumerPort ::> fillState;
}
} 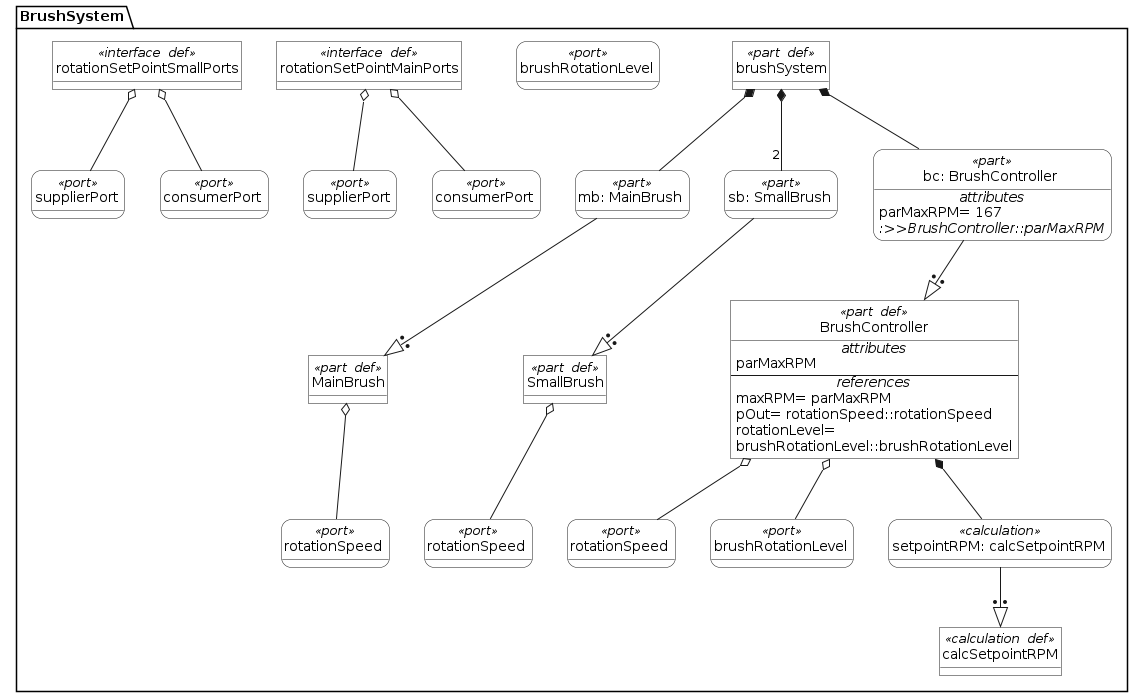
package BrushSystem {
private import ScalarValues::*;
private import RobotPortDefs::*;
private import ISQSpaceTime::*;
/*
calc def calcSetpointRPM {
in rotationLevel : Real;
in maxRPM :> ISQSpaceTime::rotationalFrequency;
return : ISQSpaceTime::rotationalFrequency;
rotationLevel * maxRPM
}
*/
part def MainBrush {
port rotationSpeed : ~BrushRotationSpeed;
}
part def SmallBrush {
port rotationSpeed : ~BrushRotationSpeed;
}
part def BrushController {
//port rotationSpeed : BrushRotationSpeed = setpointRPM.rotSpeed;
port brushRotationLevel : ~BrushRotationLevel;
attribute parMaxRPM :> ISQSpaceTime::rotationalFrequency;
/*
calc setpointRPM : calcSetpointRPM {
in rotationLevel = brushRotationLevel::brushRotationLevel;
in maxRPM = parMaxRPM;
return rotSpeed;
}
*/
}
part def brushSystem{
part mb : MainBrush;
part sb : SmallBrush[2];
part bc : BrushController{
attribute redefines parMaxRPM = 167; // 10000 rpm is a common rotational speed of the brushes, recalculation because rotationalFrequency is [1/s]
}
port brushRotationLevel : ~BrushRotationLevel;
connect bc to mb;
interface def rotationSetPointMainPorts {
end supplierPort : BrushRotationSpeed;
end consumerPort : BrushRotationSpeed;
}
/*
interface: rotationSetPointMainPorts connect
supplierPort ::> bc.rotationSpeed to
consumerPort ::> mb.rotationSpeed;
connect bc to sb;
*/
interface def rotationSetPointSmallPorts {
end supplierPort : BrushRotationSpeed;
end consumerPort : BrushRotationSpeed;
}
/*
interface: rotationSetPointSmallPorts connect
supplierPort ::> bc.rotationSpeed to
consumerPort ::> sb.rotationSpeed;
*/
}
}

package FilterSystem {
private import RobotPortDefs::*;
part def Tank {
port debris : ~Debris;
port fillState : FillState;
// Missing State Machine
}
part def Filter {
port dirtyAirFlow : DirtyAirFlow;
port cleanAirFlow : CleanAirFlow;
port debris : Debris;
}
part def filterSystem {
port dirtyAirFlow : DirtyAirFlow;
port cleanAirFlow : CleanAirFlow;
port fillState : FillState;
part filterCmp : Filter;
part tank : Tank;
interface def dirtyAirFlowPorts {
end supplierPort : DirtyAirFlow;
end consumerPort : DirtyAirFlow;
}
interface: dirtyAirFlowPorts connect
supplierPort ::> dirtyAirFlow to
consumerPort ::> filterCmp.dirtyAirFlow;
interface def cleanAirFlowPorts {
end supplierPort : CleanAirFlow;
end consumerPort : CleanAirFlow;
}
interface: cleanAirFlowPorts connect
supplierPort ::> filterCmp.cleanAirFlow to
consumerPort ::> cleanAirFlow;
connect filterCmp to tank;
interface def debrisPorts {
end supplierPort : Debris;
end consumerPort : Debris;
}
interface: dirtyAirFlowPorts connect
supplierPort ::> filterCmp.debris to
consumerPort ::> tank.debris;
interface def fillStatePorts {
end supplierPort : FillState;
end consumerPort : FillState;
}
interface: fillStatePorts connect
supplierPort ::> tank.fillState to
consumerPort ::> fillState;
}
} 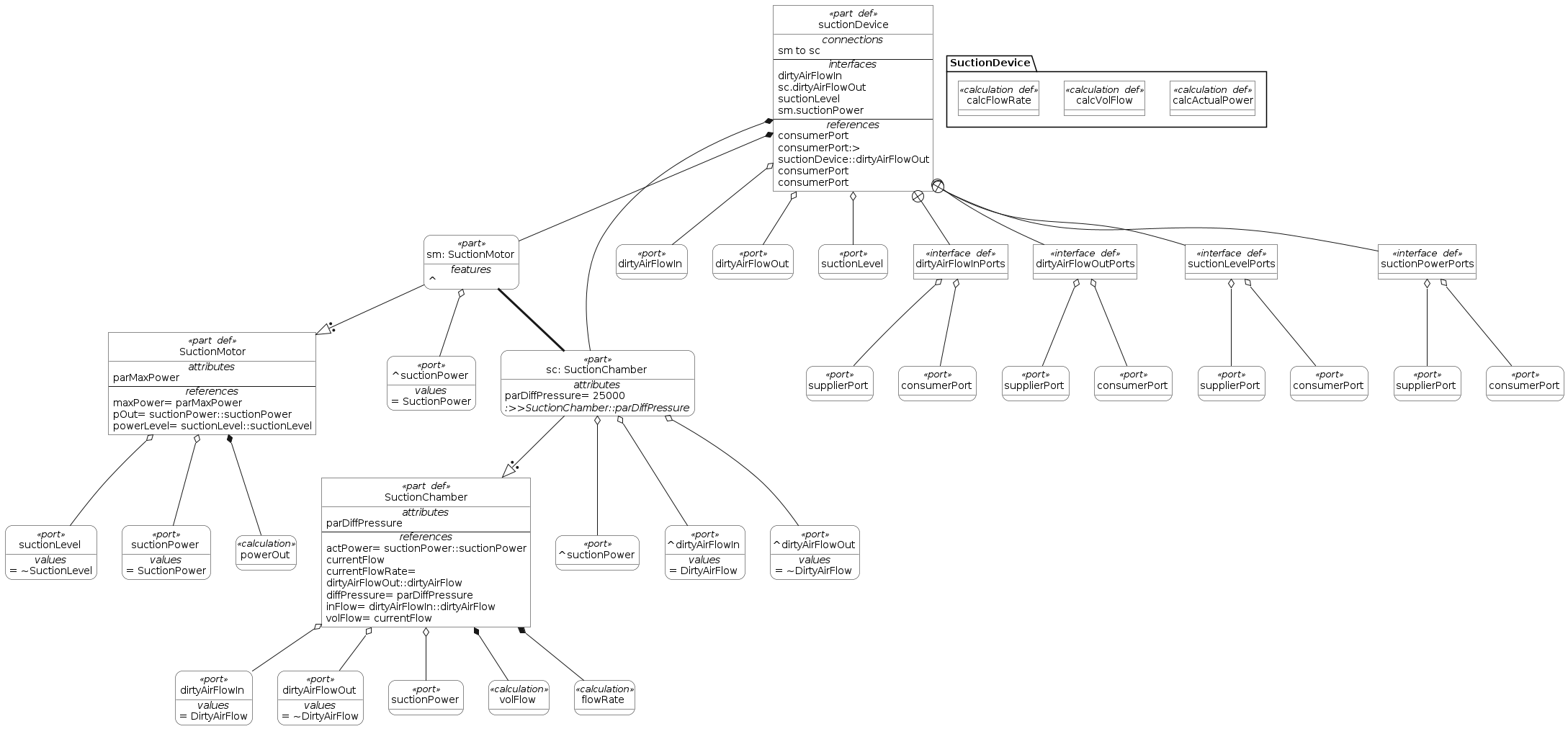
package SuctionDevice {
private import RobotPortDefs::*;
private import Ports::*;
private import ISQ::*;
private import ISQMechanics::*;
private import ISQSpaceTime::*;
private import ScalarValues::*;
/*
calc def calcActualPower {
in powerLevel : Real;
in maxPower : PowerValue;
return PowerValue = powerLevel * maxPower;
}
calc def calcVolFlow {
in setpointPower :> ISQ::power;
in diffPressure :> ISQ::pressure;
return : ISQMechanics::volumeFlowRate = setpointPower / diffPressure;
}
calc def calcFlowRate {
in inFlow :> ISQSpaceTime::volume;
in volFlow :> ISQMechanics::volumeFlowRate;
return : ISQSpaceTime::volume;
// not sure how to model without time steps
}*/
part def SuctionMotor {
port suctionLevel : ~SuctionLevel;
port suctionPower : SuctionPower {
//suctionPower = powerOut.res;
}
attribute parMaxPower :> ISQ::power;
/*
calc powerOut : calcActualPower {
in powerLevel = suctionLevel::suctionLevel;
in maxPower = parMaxPower;
return res;
}*/
}
part def SuctionChamber {
port dirtyAirFlowIn : DirtyAirFlow;
port dirtyAirFlowOut : ~DirtyAirFlow {
//dirtyAirFlow = flowRate.currentFlowRate;
}
port suctionPower : ~SuctionPower;
attribute parDiffPressure :> ISQ::pressure;
/*
calc flowRate : calcFlowRate {
in inFlow = dirtyAirFlowIn::dirtyAirFlow;
in volFlow = calcVolFlow(suctionPower::suctionPower, parDiffPressure);
return currentFlowRate;
}*/
}
part def suctionDevice {
part sm : SuctionMotor;
part sc : SuctionChamber {
attribute redefines parDiffPressure = 25000; // 25kPa is a common pressure difference for suction devices
}
port dirtyAirFlowIn : DirtyAirFlow;
port dirtyAirFlowOut : ~DirtyAirFlow;
port suctionLevel : ~SuctionLevel;
interface def dirtyAirFlowInPorts {
end supplierPort : DirtyAirFlow;
end consumerPort : DirtyAirFlow;
}
interface: dirtyAirFlowInPorts connect
supplierPort ::> dirtyAirFlowIn to
consumerPort ::> sc.dirtyAirFlowIn;
interface def dirtyAirFlowOutPorts {
end supplierPort : DirtyAirFlow;
end consumerPort : DirtyAirFlow;
}
interface: dirtyAirFlowOutPorts connect
supplierPort ::> sc.dirtyAirFlowOut to
consumerPort ::> dirtyAirFlowOut;
interface def suctionLevelPorts {
end supplierPort : SuctionLevel;
end consumerPort : SuctionLevel;
}
interface: suctionLevelPorts connect
supplierPort ::> suctionLevel to
consumerPort ::> sm.suctionLevel;
connect sm to sc;
interface def suctionPowerPorts {
end supplierPort : SuctionPower;
end consumerPort : SuctionPower;
}
interface: suctionPowerPorts connect
supplierPort ::> sm.suctionPower to
consumerPort ::> sc.suctionPower;
}
}